3.6.3.1. Simulation rotative et linéaire (MCD) 3.6.3.1.1. Exemple de simulation linéaire avec un vérin FESTO |  |
| Précédent | Suivant |
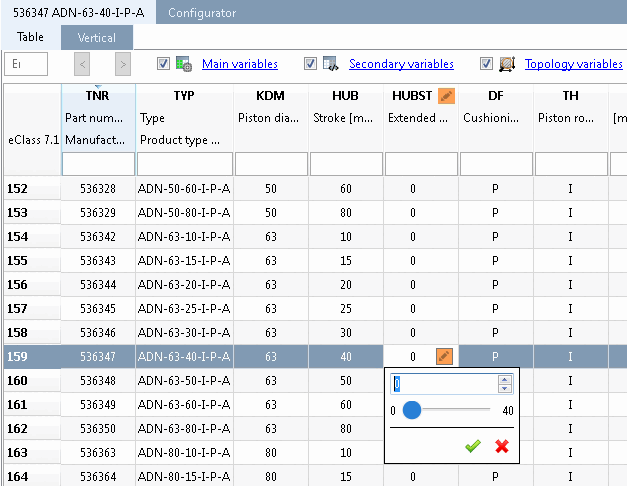
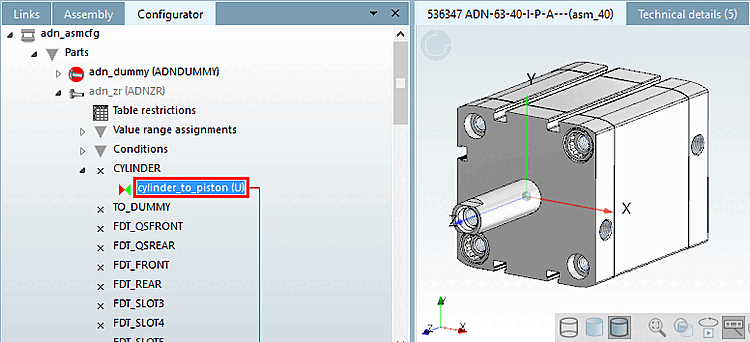
Passez en mode de configuration dans PARTdataManager et vérifiez quelle règle représente la connexion entre les pièces mobiles - par exemple entre le cylindre et le piston. Ouvrez la règle.
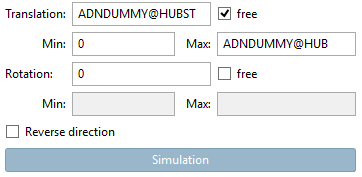
Dans la zone de dialogue Positionnement [Positioning], la case à cocher Translation [Translation]"libre [free]" doit être activée et les valeurs min [Min]. et max. doivent être spécifiées en fonction des limites physiques du produit "réel". (Ici, dans l'exemple, il s'agit d'une translation [Translation] -mouvement de la tige de piston).
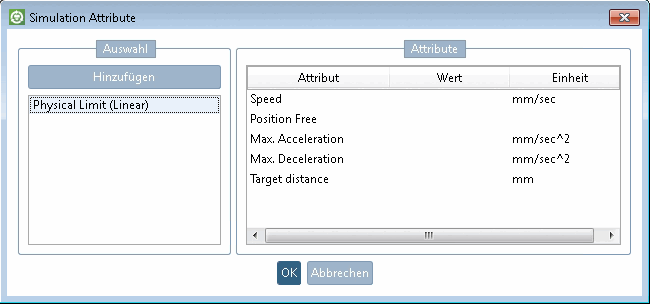
-> La boîte de dialogue Attributs de simulation [Simulation attributes] s'ouvre.
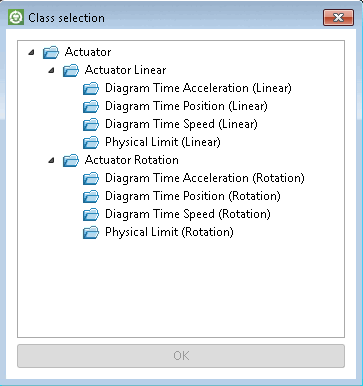
-> La boîte de dialogue Sélection de classe [Class selection] s'ouvre.
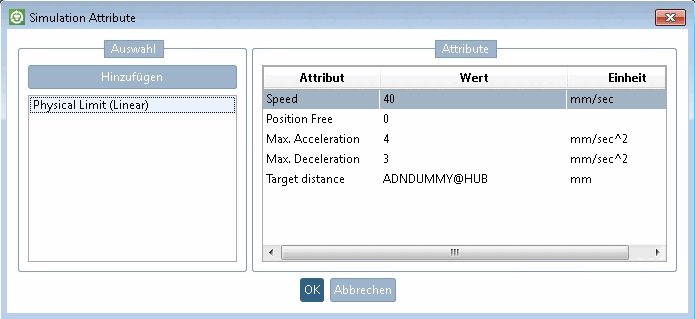
Choisissez Actuator > Actuator Linear > Physical Limit (Linéaire) et validez par .
-> Les attributs correspondants sont affichés dans la boîte de dialogue.
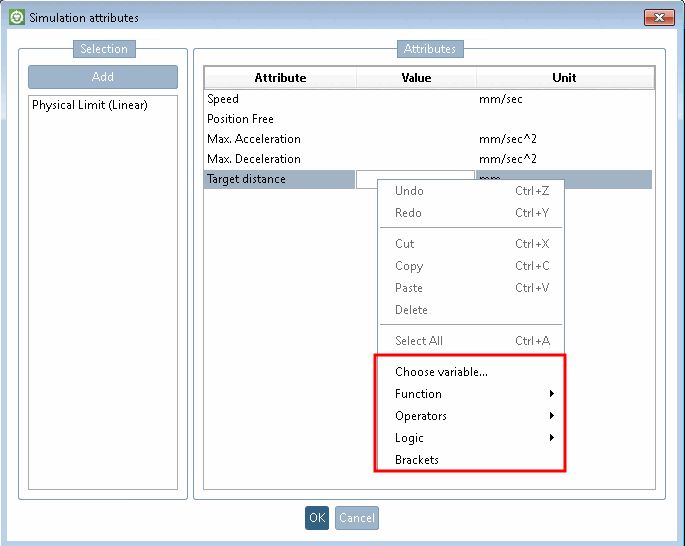
Déterminez les valeurs des attributs en fonction du produit réel.
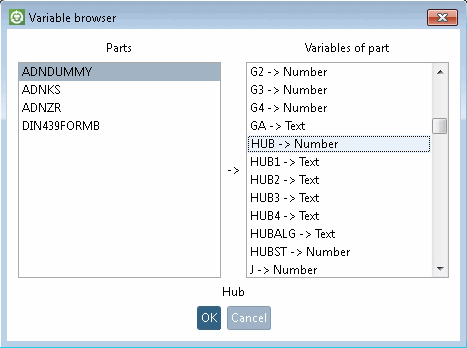
Dans le menu contextuel d'un champ ouvert, on trouve différentes fonctions utiles pour la sélection de la valeur :
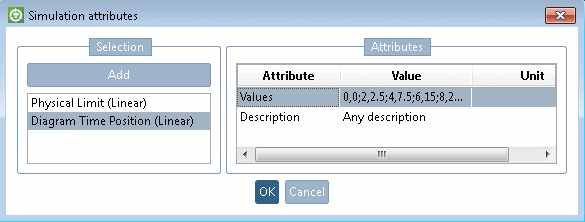
En option, il est également possible de définir des profils de mouvement pour exécuter un mouvement dynamique (donné par exemple par les diagrammes de mouvement dans les données de produit originales). Dans ce cas, cliquez à nouveau sur et choisissez Actuator > Actuator Linear > Diagram Time Position.
Déterminez ensuite les valeurs selon le modèle suivant. (N'importe quel nombre de paires d'entrées est possible).
Zeit,Position;Zeit,Position;etc.
0,0;2,2.5;4,7.5;6,15;8,25;10,40
Dans l'exemple, des valeurs de position comprises entre 0 et 40 (correspondant à la position de la course) sont utilisées.
Il est également possible d'ajouter plusieurs profils de mouvement si l'on dispose de différents diagrammes avec différentes charges par exemple. Vous pourrez ensuite les utiliser individuellement dans le Concepteur mécatronique. Pour pouvoir les distinguer les uns des autres, vous pouvez ajouter une description dans la boîte de dialogue.
Cliquez sur Enregistrer la configuration [Save configuration] dans le menu du configurateur [Configurator].
Le composant est maintenant prêt à être exporté pour être testé. Voir ci-dessous.
![[Remarque]](https://webapi.partcommunity.com/service/help/latest/pages/fr/3dfindit/doc/images/note.png)