3.6.3.1. Simulazione rotativa e lineare (MCD) 3.6.3.1.1. Esempio di simulazione lineare con un cilindro FESTO |  |
| Indietro | Avanti |
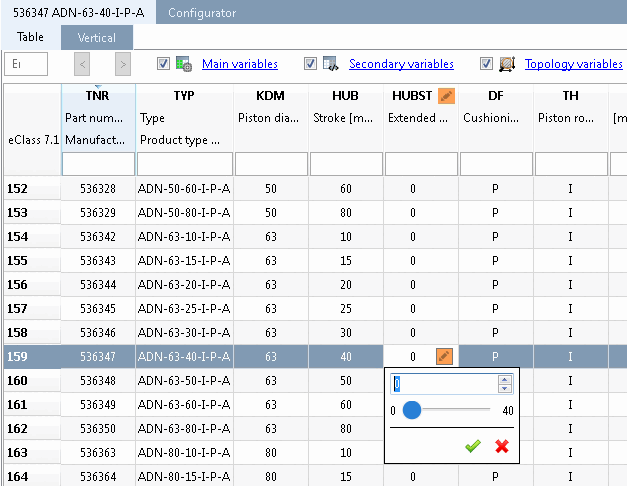
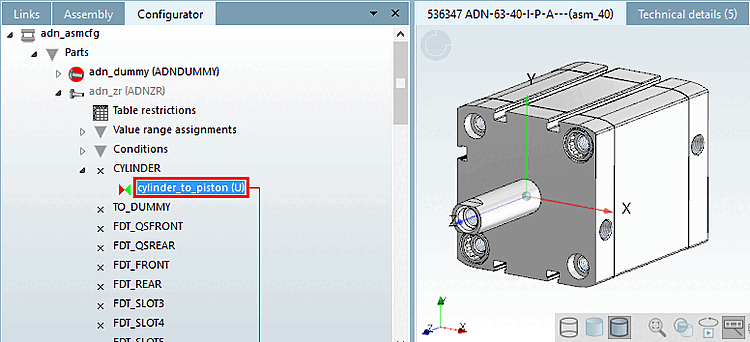
Passare alla modalità di configurazione in PARTdataManager e verificare quale regola rappresenta il collegamento tra le parti mobili, ad esempio tra cilindro e pistone. Aprire la regola.
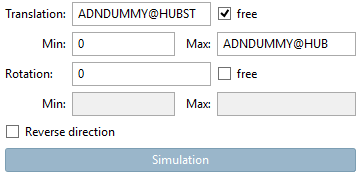
Nell'area di dialogo Posizionamento [Positioning], è necessario attivare la casella di controllo Traslazione [Translation] "libera [free]" e specificare i valori minimo [Min] e massimo in base ai limiti fisici del prodotto "reale". (In questo esempio, si tratta di un movimento di traslazione [Translation] dello stelo).
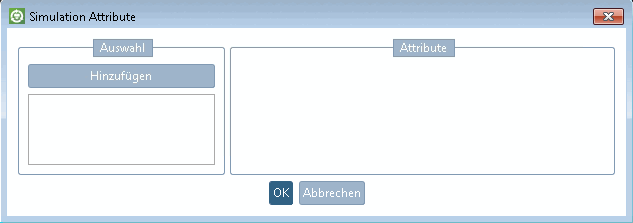
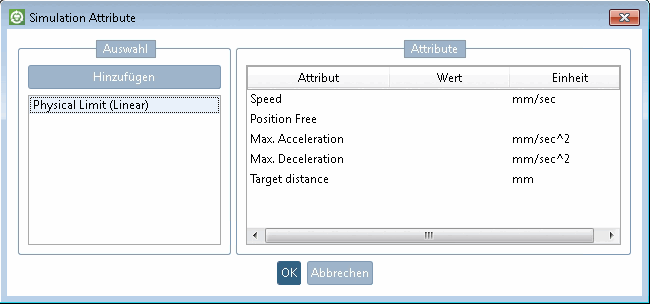
-> Si apre la finestra di dialogo Attributi della simulazione [Simulation attributes].
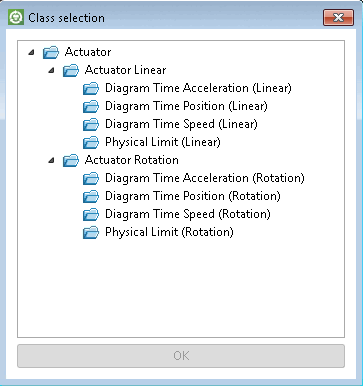
-> Si apre la finestra di dialogo per la selezione della classe [Class selection].
Selezionare Attuatore > Attuatore lineare > Limite fisico (lineare) e confermare con .
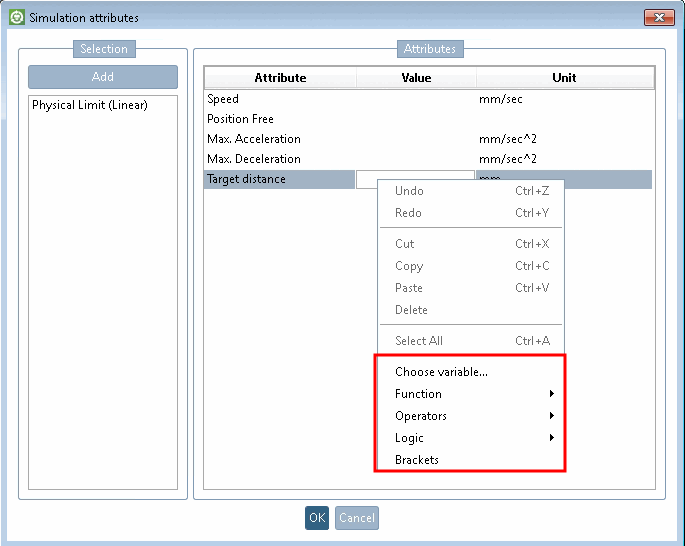
-> Gli attributi corrispondenti vengono visualizzati nella finestra di dialogo.
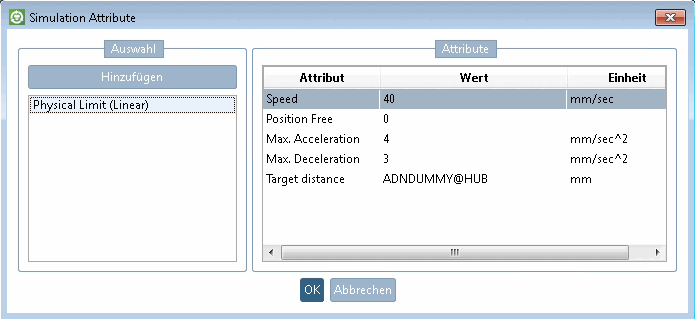
Determinare i valori degli attributi in base al prodotto reale.
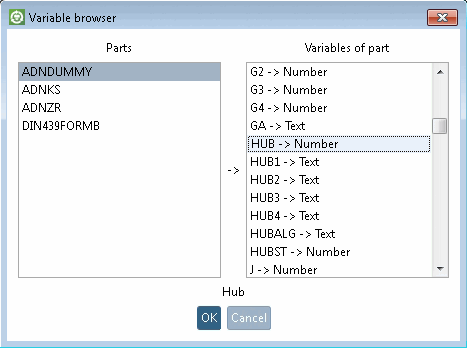
Il menu contestuale di un campo aperto contiene varie funzioni utili per la selezione del valore:
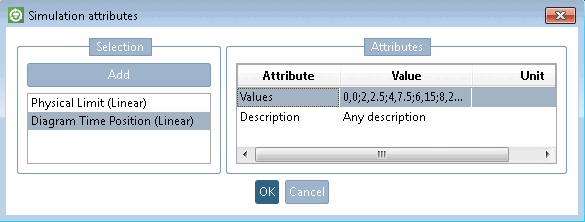
Opzionalmente, è possibile impostare ulteriori profili di movimento per eseguire un movimento dinamico (ad esempio, dato dai diagrammi di movimento nei dati originali del prodotto). In questo caso, fare nuovamente clic su e selezionare Attuatore > Attuatore lineare > Diagramma Posizione temporale.
Determinare quindi i valori secondo il seguente schema. (È possibile un numero qualsiasi di coppie di ingressi).
Zeit,Position;Zeit,Position;etc.
0,0;2,2.5;4,7.5;6,15;8,25;10,40
Figura 3.171. Nell'esempio, si utilizzano valori di posizione compresi tra 0 e 40 (corrispondenti alla posizione della corsa).
È inoltre possibile aggiungere più profili di movimento se sono disponibili, ad esempio, diversi diagrammi con carichi diversi. In seguito è possibile utilizzarli singolarmente nel Mechatronics Concept Designer. Per distinguerli l'uno dall'altro, è possibile aggiungere una descrizione nella finestra di dialogo.
Cliccare su Salva configurazione [Save configuration] nel menu Configuratore [Configurator].
Il componente è ora pronto per essere esportato per il test. Vedere sotto.
![[Nota]](https://webapi.partcommunity.com/service/help/latest/pages/it/3dfindit/doc/images/note.png)